廃炉プロジェクト > 基本姿勢 > 技術開発 > ロボット > 主に1階以上のフロアで活用実績のあるロボット
※これまでに当社ホームページ「写真動画集」に掲載された順で、整理・掲載しております。
|
|
|
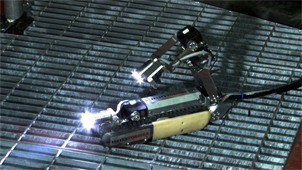
高所用ドライアイスブラスト除染装置[IRID(開発元:東芝)]
 |
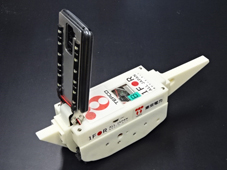
小型調査装置[開発元:東京電力ホールディングス]
 |
関連する当社HP公表情報 |
関連する当社HP公表情報 |
原子炉格納容器内部調査装置 |
原子炉格納容器内部調査装置(PMORPH)[IRID(開発元:日立GE)]
 |
|
関連する当社HP公表情報 |
遮へいブロック撤去装置(TEMBO)[IRID(開発元:三菱重工)]
 |
堆積物除去装置[IRID]
 |
関連する当社HP公表情報 |
|
原子炉格納容器内部調査装置 |
カニクレーン[開発元:日立GE]  |
関連する当社HP公表情報 |
関連する当社HP公表情報 |
Rosemary(ローズマリー)[IRID (開発元:千葉工業大学、日立GE)]  |
Sakura(サクラ)[IRID (開発元:NEDO、千葉工業大学、日立GE)]  |
関連する当社HP公表情報 |
関連する当社HP公表情報 |
高圧水除染装置(Arounder)[IRID (開発元:日立GE)]  |
吸引・ブラスト除染装置(MEISTeR)[IRID (開発元:三菱重工業)]  |
|
|
ドライアイスブラスト除染装置[IRID (開発元:東芝)]  |
ハスクバーナー DXR-140改造品[協力※5:東芝]  |
|
関連する当社HP公表情報 |
レーザースキャン搭載ロボット[協力※5:日立GE]  |
ラクーン[協力※5:アトックス]  |
関連する当社HP公表情報 |
|
ASTACO-SoRa(アスタコ ソラ)[協力※5:日立GE]  |
高所調査用ロボット[協力※5:Honda・産業技術総合研究所]  |
|
|
FRIGO-MA(フライゴーエムエー)[協力※5:三菱電機特機システム]  |
Warrior(ウォーリアー)[協力※5:iRobot]  |
関連する当社HP公表情報 |
|
Quince 1,2,3(クインス)[協力※5:千葉工業大学、東北大学、 国際レスキューシステム研究機構]  |
Packbot(パックボット)[協力※5:iRobot]  |
|
関連する当社HP公表情報
|
© Tokyo Electric Power Company Holdings, Inc.
 ※1
※1  ※2
※2