![]()
![]()
Decommissioning Plan of Fukushima Daiichi Nuclear Power > Basic Principles > Technology & Knowledge > Robot Technology > 1st floor
* Robots are arranged in the order of being posted on the "Photos and Videos Library" of our web site.
|
|
|
Dry Ice Blast Decontamination Equipment for High Places[IRID (developed by Toshiba)]
 |
Small Investigation Device[developed by TEPCO Holdings]
 |
Related official information |
Related official information |
Equipment to Remove Shielding Blocks (TEMBO)[IRID (developed by Mitsubishi Heavy Industries)]
 |
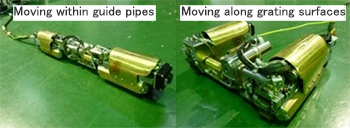
Device to Inspect Interior of Primary Containment Vessel (Shape-changing Robot)[IRID (developed by Hitachi GE)]
 |
Related official information |
|
Kanicrane[developed by Hitachi GE]
 |
Rosemary[IRID (developed by Chiba Institute of Technology, Hitachi GE]
 |
Related official information |
Related official information |
Sakura[IRID (developed by NEDO, Chiba Institute of Technology, Hitachi GE]
 |
High Pressure Water Decontamination Robot[IRID (developed by Hitachi GE)]
 |
Related official information |
|
Absorption/blast Decontamination Robot |
Dry Ice Blast Decontamination Robot[IRID (developed by Toshiba)]
 |
Related official information
|
|
Husqvarna (DXR-140 remodeling)[cooperated*5 by Toshiba]
 |
Robot equipped with laser scanning[cooperated*5 by Hitachi GE]
 |
Related official information |
Related official information |
Raccoon[cooperated*5 by ATOX]
 |
ASTACO-SoRa[cooperated*5 by Hitachi GE]
 |
|
|
High-access Investigation Robot[cooperated*5 by Honda, AIST]
 |
FRIGO-MA[cooperated*5 by Mitsubishi Electric TOKKI Systems]
 |
|
Related official information |
Warrior[cooperated*5 by iRobot]
 |
Quince 1,2,3[cooperated*5 by Chiba Institute of Technology, Tohoku University, International Recue System Institute]
 |
Related official information |
Related official information
|
Packbot[cooperated*5 by iRobot]
 |
|
Related official information
|
[Notes]
![]()
![]()
© Tokyo Electric Power Company Holdings, Inc.












 *1
*1  *2
*2