スマートフォンロボット
目的
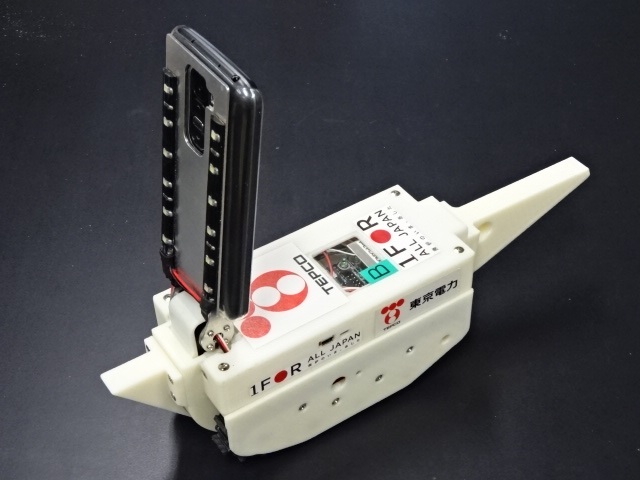
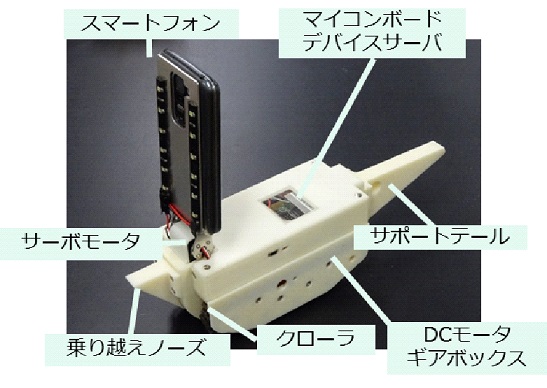
福島第一原子力発電所では、高線量で人が長時間立ち入れないエリアがあるため、廃炉に向けた調査や作業にロボットを活用しています。当社では、廃炉作業を確実に進めるため、スマートフォンを利用した遠隔操作ロボットである「スマホロボット」を自主開発しました。
概要と成果
スマホロボットによる原子炉格納容器(PCV)機器ハッチ調査
福島第一原子力発電所3号機原子炉格納容器の機器ハッチ付近に高線量の水溜りが確認されたため、2015年11月、スマホロボットにより遠隔操作で機器ハッチシール部からの漏えいの有無の調査を行いました。「低線量の場所から遠隔操作可能」「狭隘なクランクを通過可能」「最大50mmの段差を昇降」等の課題をクリアし、調査に成功しました。
| サイズ | L319mm×W77mm×H105mm |
|---|---|
| 重さ | 787g 走行性(方向) 前進、後退、超信地旋回 |
| 走行性(段差) | 最大50mm |
| 走行性(隙間) | 最大70mm |
| 電源 | リチウムイオン電池 |
| 機能 | チルトカメラ、LED照明 |
| 駆動時間 | 20分 |
屋外燃料評価実験場(燃焼炉)

機器ハッチ調査中のスマホロボット
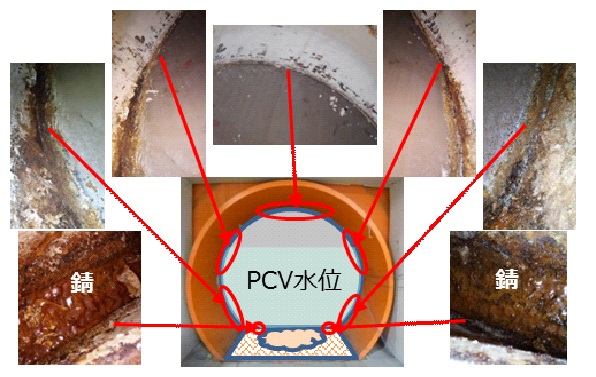
機器ハッチシール部のPCV内水位付近から下に向かって錆等の汚れを確認
成果の適用先・事例
スマートフォン、3Dプリンタ、民生用部品を活用して原子炉建屋内の過酷環境で使用するロボットを短期間かつ安価に開発しました。今後も今回の知見やオープンイノベーションを活用し、発電所等、様々な環境へ適用可能なロボットの開発を行っていきます。
担当部署
経営技術戦略研究所 技術開発部 環境・エネルギーエリア