ロボットによる現場の課題解決を目指して ~人の役に立つロボットのために、課題を一つひとつクリア
2017/07/14
7月19日から実施する3号機原子炉格納容器(PCV)の内部調査は、多くの技術者の地道な努力や試行錯誤を経て行われるものです。
2年前の2015年に、同じく3号機のPCV付近の調査を行った「スマホロボット」。このロボットの開発に携わった当社、経営技術戦略研究所の社員に、ロボット開発に対する思いについて話を聞いてみました。

開発した「スマホロボット」が廃炉に貢献
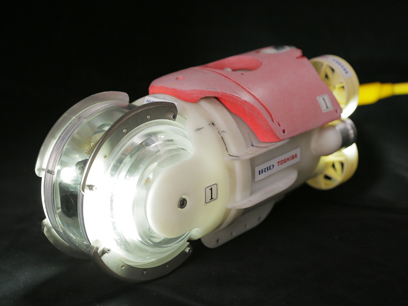
2015年11月、福島第一原子力発電所の廃炉作業に必要な調査のため、3号機にロボットが投入されました。このロボットは、通称「スマホロボット」と呼ばれており、人が容易には近づくことが出来ない過酷な状況下にある、3号機原子炉建屋内のPCVの機器搬入口の状況を調査するために開発した小型調査ロボットです。
ロボットといっても「アトム」や「ガンダム」のような何でも出来る高性能かつ高価なスーパーロボットではありません。調査用カメラには、一般のスマートフォンを使用し、ボディは3Dプリンタで製作、徹底的にコストを抑え、調査に必要な機能だけを搭載するというシンプルな設計としました。
当時の開発チームは3名。一人は機械、一人はソフトウエア、私は電気が専門分野です。それぞれが自分の専門を生かし、福島の仲間と協力しながら試行錯誤を繰り返し100%私たちの手で完成させました。開発期間もコストも限られる中、「自分たちの会社が起こしてしまった事故を何とか早く収束させたい。自分たちが持っている技術で何か貢献したい。」そういったチームの使命感が一つになって出来上がったロボットです。

このロボットで、2015年11月26日に調査を行ない、機器搬入口外周部に錆等の汚れがあることを確認しました。調査結果は、PCV補修技術の開発に活用されています。また、TVニュースや新聞、ウォールストリートジャーナル電子版等でも紹介され、自分たちの作ったもので廃炉に貢献できたという大きな喜びがありました。
課題を一つひとつクリア、福島の仲間と共に
廃炉調査ロボットの完成までに、課題はたくさんありました。
福島第一3号機の調査は、事故後の現場状況がほとんど分からず、ロボットの通るルートさえ、事前に決めることが出来ませんでした。そのため、まず類似する5号機で動作確認試験を積み重ね仕様を固めていきました。しかし、3号機の内部状況は5号機にはない段差があることが分かるなど問題は山積み。現場を確認することが出来ないため、段差の高さも良くわからず、時間、材料、加工技術も限られているなか、チーム全員でアイデアを出しました。改良と試験を何度も繰り返し、キャタピラの形状を工夫することで何とかクリアできました。
課題はその他にもありました。それまでのロボットは、アクリル板で角ばったボディを製作していましたが、狭い場所を通過しようとすると引っかかりスムーズに動くことが出来ません。どうするか対策を考えていた際、偶然、思いついたのが趣味の鉄道模型で使っていた3Dプリンタを利用することでした。3Dプリンタであれば自由に、適切なサイズで滑らかなボディを作る事が可能です。

廃炉支援だけでなく、今後は、保守点検の合理化等の分野などへのロボット適用を検討していく予定であり、また新たな課題を解決していかなければなりません。現在のロボットチーム5人だけでなく、横の連携を大切に、研究所全体、会社全体で知見を共有し、さまざまな技術、知識を融合して新たな課題を解決して行きたいです。その先に、福島と東京電力の未来がある、そう信じて、一つひとつ地道に課題を解決しながら、技術開発に邁進していきたいと考えています。
東京電力ホールディングス株式会社
阪上 知己 (さかうえ ともき)
経営技術戦略研究所 技術開発部 次世代電力インフラエリア スペシャリスト
1999年入社
関連ページ一覧
-
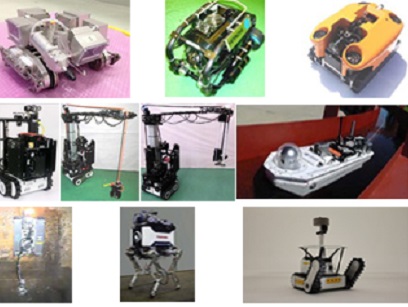
ロボット技術の活用
~福島第一原子力発電所 ロボットを活用した安定化・廃炉作業柏福島第一原子力発電所では、事故の安定化および廃炉の推進のために、遠隔技術(ロボット)を活用しています。これまで主に、人に代わってロボットが原子炉建屋内の調査などを実施し、その後の作業計画に反映することで、被ばくなどの作業リスクの低減に寄与しています。
-
【動画】福島第一原子力発電所3号機原子炉格納容器内部調査に向けて
~福島第一原子力発電所3号機の原子炉格納容器内部調査を2017年7月19日より開始当社は、福島第一原子力発電所3号機の原子炉格納容器内部調査を2017年7月19日より開始する予定です。これまでの調査から、3号機原子炉格納容器内の水位は高いことがわかっているため、今回3号機には水中で調査可能なロボットを投入します。